The Essentials Of Hybrid Location Technologies

This file type includes high resolution graphics and schematics.
Location-based services (LBS) is one of the fastest growing segments in mobile device applications, so it is easy to understand the urgency to provide accurate-everywhere location (5- to 10-m accuracy) in any environment. Considering some of the data about how and where mobile devices are used, it is apparent why indoor positioning is becoming a much higher-value item (and a much bigger challenge) than outdoor, from both a regulatory and commercial perspective.
Table Of Contents
- Drivers And Technologies
- A-GPS/A-GNSS
- Wi-Fi Positioning
- Cellular Positioning Methods
- MEMS Sensors Positioning
- Other Technologies
- Test Strategies
- Summary
Drivers And Technologies
Mobile’s worldwide expansion and the demands of cellular subscribers are driving the growth of indoor location technology (Table 1).

For example, E911 is a primary application. If you make an emergency call from your cell phone, first responders can use LBS technology to find you. Next-generation LBS technologies that can work indoors will provide additional convenient advantages that go beyond safety applications.
Related Articles
- Adding A GPS Chipset To Your Next Design Is Easy
- GPS Modules Provide Enhancements To GPS Capability
- Real-World Drive Tests Declare A Verdict On GPS/GLONASS
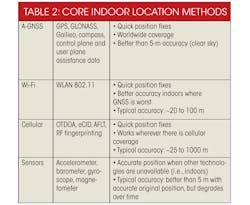
Most mobile users associate location with GPS technologies. When users have a clear and unobstructed sky, the Global Navigation Satellite System (GNSS), which encompasses GPS and other satellite constellations such as GLONASS, delivers accurate location information. But when users move indoors, alternative technologies must be used in various combinations to provide the accurate location fix needed to maintain seamless service (Table 2).
A-GPS/A-GNSS
Assisted-GPS (A-GPS) uses the GPS satellite constellation, which is controlled by the U.S. military and consists of 30 satellites in medium earth orbit. The network provides “assistance” data to the handset, which includes information to speed up the process of locking on to satellites. The final position can be calculated at the user equipment (UE), termed UE-based positioning, or at the network, termed UE-assisted positioning. To speed up the process of obtaining a GPS fix, the network provides satellite constellation information, including:
- Current GPS constellation for the UE’s location
- Current GPS time
- Information on satellite orbits
- Frequency shifts in GPS frequencies because of Doppler effects
The availability of access to the GPS system chiefly governs A-GPS performance. The reference signals are very weak, easily attenuated, or even outright blocked by environmental obstructions. Any remaining satellite signals suffer heavy multipath, and any visible satellites may display poor geometry, which causes a higher positioning error. These issues are most prominent in urban and indoor situations.
Assisted GNSS (A-GNSS) uses satellite constellations other than GPS to improve overall satellite availability (Table 3).
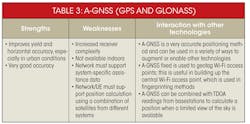
Increasing the number of visible satellites in the sky would cause fewer of them to be blocked out and provide better geometry, increasing performance in urban situations. Currently, the Russian GLONASS system is available for use (Fig. 1). With A-GPS, the network can choose to provide assistance data for the additional satellite systems for enhanced performance. With clear visibility, A-GNSS provides very high accuracy, as high as 5 meters under 16 seconds in cold start.

Smart phones commonly support Wi-Fi to connect to the Internet, a feature encouraged by network operators to offload the large amounts of cellular data a standard smart phone generates. In addition, the properties of the Wi-Fi technology can be exploited for positioning (Table 4).
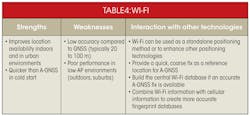
There are many different proprietary implementations of Wi-Fi positioning, including fingerprinting techniques, which take advantage of environments with high Wi-Fi access point (AP) density such as cities and buildings (Fig. 2).

First, the device scans and sends information about the visible Wi-Fi APs—generally the strongest APs are rated in terms of received signal. Second, this information is reported to a server on the network. The server houses a database of APs associated with geo tags and other markers. A fingerprinting algorithm is applied to the input from the handset, which then provides an estimate of the mobile’s position.
The information doesn’t always have to be provided to the network. Instead, the network may provide a subset of its central database to the handset, which then can run the fingerprinting algorithm itself. The fingerprinting algorithm can only work if a sufficiently advanced central database of Wi-Fi APs for the location of interest is available. This database is created by:
- Wardriving: Driving (or walking) in specific areas and using high-grade receivers to collect visible Wi-Fi AP data.
- Crowd sourcing: Having a smart phone constantly report observed Wi-Fi APs along with a GPS location (if available) to location servers
Cellular Positioning Methods
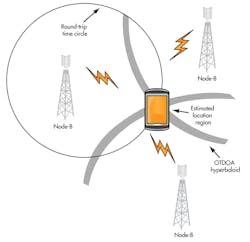
Cellular positioning methods purely use the transmissions from cell towers and the handset to find the handset position (Fig. 3).
This file type includes high resolution graphics and schematics.
Some of these methods require active participation from the handset, such as signal readings and time-of-arrival (TOA) measurements (Table 5).
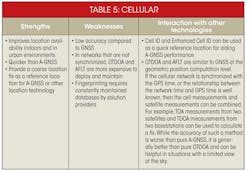
Cell ID is a network-based positioning method where the UE’s position is estimated depending on the cell it is camped on. In the enhanced cell ID (eCID) method, the handset sends cell measurements to the network, which can be used to better estimate the position. Measurements can include (depending on the radio access technology or RAT) round-trip time (RTT) and timing advance. These methods can be used in any cellular network, but eCID position estimation techniques may be proprietary. They are accurate from 250 to 1000 m.
Fingerprinting methods are similar to the approach used for Wi-Fi positioning. A central database is created with geotagged cell information, such as received signal strength indication (RSSI), cell ID, real-time difference (RTD), and network measurement record (NMR) in GSM. The UE reports currently observed network information from the serving cell and all other nearby cells. This information is used as an input to a fingerprinting algorithm that estimates the UE position. Accuracy is 100 to 300 m.
In time difference of arrival (TDOA) methods (downlink only), the UE detects the TDOA of signals between the serving basestation and one or more neighbors. The time differences can be used to estimate the UE position. Typically, TDOA methods are more effective in synchronized networks. Accuracy ranges from 25 to 300 m. Common applications include:
- CDMA/advanced forward link trilateration (AFLT): Time differences in pilot signals from the serving cell and the reference cell are detected and used for positioning.
- LTE/observed TDOA (OTDOA): Special cell-specific reference signals, called positioning reference signals (PRS), are used for the time difference measurements.
The key handset factors that enable good performance vary depending on the technology. They all require the UE to be able to continuously measure the signals necessary for enabling the technology, while at the same time handling all the other call and data functionality required.
Positioning must be conducted in connected mode at the same time as various network procedures such as handovers, circuit-switched fall back (CSFB), and cell reselections. Cellular positioning typically does not provide as high-grade accuracy as A-GNSS, but it can assist in deriving a quick, coarse location, as well as provide an alternative for GNSS when indoors.
MEMS Sensors Positioning
Smart phones are equipped with sensors that track device orientation and movement to enable a host of applications, such as gaming and compasses (Table 6). These sensors usually include microelectromechanical systems (MEMS).
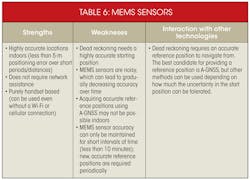
For example, accelerometers measure acceleration based on user movement. Generally, a three-axis accelerometer measures the change in user velocity position in a variety of cases, such as walking, running, falling, and vibration.
Gyroscopes measure rotational velocity. They also are implemented across three axes. Gyroscope measurements provide orientation. A combination of accelerometer and gyroscope measurements in three dimensions can be used to continuously track user position.
Magnetometers measure the earth’s magnetic field as well as any ambient magnetic influences. They are used for mapping and compass functions (potentially in conjunction with accelerometers). And, barometers measure the altitude based on air pressure changes and can be used to find a user’s position while moving up in altitude (Fig. 4).

Physical readings from the sensors are typically sent to the inertial measurement unit (IMU), which collects data from the inertial sensors, formats them, and delivers them to the sensor location subsystem—the inertial navigation solution (INS). Yet there’s a key difference in the positioning technique used by the INS compared to other location methods.
A-GNSS and Wi-Fi positioning and cellular positioning methods feature an absolute position computation process. The INS uses dead reckoning. It’s given a starting position (perhaps from an A-GNSS fix) and then uses sensor data such as speeds and angular direction to advance the position over time. Eventually, the uncertainties in the reported sensor data add up, and a new, accurate reference position is required to start the dead reckoning process over.
While GPS, Wi-Fi, and cellular technologies provide the user’s position on the map, sensors can provide an idea of how the mobile device itself is moving—whether it’s being turned, set on a table, or thrown. This fine-grade information can be very useful for enabling applications such as gaming. It also presents a challenge.
If purely position calculation is of interest, then the positioning engine must be able to intelligently filter out extraneous effects such as the rhythmic motions of walking or running and holding the handset in different positions while talking. Different people have different usage profiles, so the sensor’s positioning engine must be able to robustly handle a variety of different scenarios.
Other Technologies
There are other potential technologies for finding a mobile user’s location such as Bluetooth beacons, indoor messaging systems (IMES), machine-to-machine (M2M) communications, near-field communications (NFC), radio-frequency identification (RFID), and ultrasonic beacons. These techniques aren’t widely used, but that may change. For example, RFID tags can be installed in certain pre-determined locations and then serve as reference position generators for other positioning technologies such as sensors and GNSS.
One of the key enablers of hybrid positioning is an entity that can intelligently determine which positioning technique to use depending on reported readings from the handset. This entity may reside on the handset, on the network, or on some combination thereof. For example, the central database server for Wi-Fi positioning may be on the network, but a client on the device could get “snippets” of the database relevant to the current location. Termed the positioning engine, it implements a position calculation function (PCF) using Kalman filters to process input data from a variety of sources, for example.
Hybrid location technologies simultaneously carry out all of these positioning techniques. Depending on the reported readings, the positioning server prioritizes certain methods over others. In addition, methods that provide a fast, low-accuracy fix may be prioritized over those that are slow but provide high-accuracy fixes.
Positioning may occur in MS-assisted (mobile station) or MS-based mode. In the MS-assisted mode, the positioning server calculates the final position based on measurements provided by the handset. In MS-based mode, the handset calculates the position based on its own measurements and optionally reports the final position to the server (Table 7).
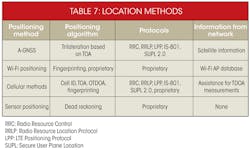
A-GPS traditionally has used one of the two methods. The situation is more complicated with hybrid location technologies, since each technology could use one or the other method. Much of hybrid positioning uses proprietary techniques, so the actual mechanisms of information exchange may differ depending on the implementation.
Test Strategies
Hybrid positioning requires the successful simultaneous manipulation of various positioning technologies, protocols, and network elements. The challenge is to devise test methodologies that can be used to ensure good device performance given the complicated test conditions the device has to face. Field testing and lab testing are two main strategies for test development.
Field testing is an excellent way of ensuring device performance. Field environments such as a mall, a highway, or a busy city street are chosen, and device performance is characterized there. The device is generally connected to a data analysis unit that studies performance and calculates metrics. Key advantages include:
- Real environmental conditions: By selecting key environments, an accurate measure of how the device would behave in day-to-day consumer usage can be obtained.
- Identify problem areas: Field testing provides the means to identify geographic areas and environments where device performance is poor. (This requires a large enough variety of areas to conduct field tests in.)
- Typical user conditions: Field testing can be used to characterize device performance based on usage profiles. This would involve hybrid positioning while other services are executed concurrently.
Field testing is a must-have strategy to ensure device performance. However, there are weaknesses that must be addressed. For example, if a device is found to be performing poorly in a certain geographic area, isolating the exact factor that causes the poor performance is challenging.
Also, field conditions are constantly changing, both in terms of geography and in terms of RF sources. The experimental conditions cannot be repeated exactly for each trial. Field testing is time consuming as well, but advanced measurement tools and reporting engines can make the data collection and analysis process easier. Resources are still required, though, especially for repeating field tests.
A comprehensive lab test strategy can compensate for these disadvantages. A-GPS has plenty of defined lab tests. Conformance standards such as TS37.571 and the Open Mobile Alliance Secure User Plane Location Enabler Test Specification (OMA SUPL ETS) have been used for ensuring minimum device performance. Leading network operators have defined challenging test requirements that must be met for a device to be accepted on the network. Such an approach for hybrid location technologies, although slightly more challenging to set up, will go a long way in ensuring device performance standards prior to field testing.
Lab testing also offers:
- Perfectly repeatable conditions: The experimental conditions can be tightly controlled with no variation due to external factors.
- Isolation of specific conditions: If a device is performing poorly in a single scenario, control can be exerted to determine exactly why.
- Regression and stress testing: A well-defined scenario can be used to benchmark several devices.
The key lab test strategies for hybrid positioning can be broken down into two major categories: replay and simulation.
The key aim of the replay approach is to bring field conditions into the lab. At the basic level, it consists of using recording devices to capture field data—either processed information such as National Marine Electronics Association (NMEA) or Wi-Fi-scan files, or actual RF I/Q recordings—and then using lab instruments to replay this data. Data from different technologies are collected simultaneously, on the same time scale, to ensure coherent replay.
The aim of the simulation approach is to allow the user to create a scenario from scratch, providing complete control over all aspects of the environment. The idea is to create test cases that focus on certain aspects of UE performance such as GNSS sensitivity sweeps, slowly reducing power levels to determine the lowest possible level that will still provide adequate positioning performance. The simulation can be modeled on the real world. Processed field data, for example, could go into the basis of the scenario. The idea, however, is to introduce custom elements that allow characterization of certain aspects of device performance.
Summary
The LBS market is growing rapidly in size and scope, and enabling high-accuracy positioning in all environments (indoors and outdoors) is essential for both commercial and regulatory purposes. Hybrid positioning, where many different location techniques are used in combination to derive the position, promises to increase both position availability and accuracy, especially indoors.
This advanced ability comes at the cost of additional complexity, as multiple technologies and protocols interact in complicated call flows. This, in addition to proprietary implementations, insufficient coverage by standards, and varying handset architectures, presents significant test challenges. Fortunately, these test challenges can be overcome by a carefully devised test strategy combining field and lab testing.

This file type includes high resolution graphics and schematics.
About the Author
Brock Butler
Marketing Director
Brock Butler is marketing director for mobile devices at Spirent Communications. Since joining Spirent in 1999 as a development engineer, he has held various positions in product development, product management, and marketing, including five years leading Spirent’s wireless location technology product segment. He holds a BSc in electrical engineering from Villanova University. Connect with him on LinkedIn or on Twitter at @brockbutler.
Comment About the Article
To join the conversation, and become an exclusive member of Electronic Design, create an account today!

Leaders relevant to this article: