Power Density Essential for Underwater-Vehicle Operation

What you'll learn:
- Placement and powering of an AUV's propulsion motor.
- AUV battery chemisty and battery pack.
- Underwater docking and charging.
Autonomous underwater vehicles (AUVs) typically feature high efficiency and superior control, and they run silent. They incorporate a high-power-density propulsion motor, which needs a very efficient cooling method that must improve stability and reliability.
The AUV’s propulsion motor—the permanent-magnet synchronous motor (PMSM)—has rapidly become popular in many kinds of AUVs. This is mainly due to its high power density, high efficiency, silent operation, and superb controllability. AUVs gently glide underwater with a delicate balance between buoyancy and gravity.
The propulsion motor must be mounted in the AUV tail section to drive the propulsor, a mechanical assembly more complicated than a propeller.
To reach a satisfactory hydrodynamic performance, the AUV tail section is typically designed for streamlining. This leads to the buoyancy in the tail section being a little less than that of the head section. Therefore, strict requirements must be imposed on the size and weight of the propulsion motor throughout the design process. Because of the high electrical load and low thermal capacity, the high-power-density motor has a fairly high heat-generation rate.
Due to the enclosed and compact interior space of the AUV, this will create a harsh thermal environment for the propulsion motor, which may cause overheating. This can result in greater losses as well as deteriorations, such as the irreversible demagnetization of permanent magnets (PMs) and the disintegration of insulation. An efficient cooling system is critical to the reliable operation of the high-power propulsion motor.
Power Systems for AUVs
Designers of battery systems and power-transfer (charging) methods for AUVs operating within an autonomous ocean sampling network (AOSN) focus on three major issues in this challenge:3
- Battery chemistry
- In situ charging
- Pack management
Designers have to research a few key choices for battery chemistry. Engineers must evaluate these choices based on the demands of maximizing power density, along with low temperature operation particular to AUVs.
>>Download the PDF of this article, and check out the Library Series

First, we must examine the issues involved in combining individual cells into large battery packs along with problems connected with battery monitoring. Also important is the charging and discharging of such battery packs in a typical AUV application.
Next, we need to present a methodology for charging an AUV battery pack in situ to support long-term implementation at several remote sites.
An AUV Wireless Power Transfer System
Wireless charging of AUVs, via an underwater charging platform, is one of the most common charging methods.4,5 According to different berthing methods, current charging platforms are divided into inclusive, captive, and platform types.
Let’s take a look at an inclusive charging platform. It barely needs to change the shape and structure of the AUV, and the platform can provide protection when the AUV is charging. Thus, it’s become the preferred type of AUV wireless charging.
To ensure that the AUV enters and exits the charging platform smoothly, there’s usually a clearance between the platform and the AUV. This increases the transmission distance and reduces the system transmission performance.
Underwater Docking and Charging Tech for Autonomous Vehicles
It’s important to study the underwater docking technology of AUVs to provide energy supply and information interaction.6,7
Currently, the brief endurance of AUVs, along with sporadic underwater communication capabilities, are very common problems. Many recoveries have to be made for complete data downloads and power transfer. AUVs are usually recharged while on the deck of a mothership after recovery (Hagen et al., 2008), while also depending on necessary intervention with human operation. This will severely limit the detection range along with the operational efficiency (Chiche et al., 2021).
The act of autonomous launch and recovery technology has developed quickly in recent years (Sarda and Dhanak 2017, Sarda and Dhanak 2019, Szczotka 2022). Unfortunately, this effort has poor reliability when in complex sea states, most likely leading to some equipment damage. Risks, time, and cost will be quite uncontrollable.
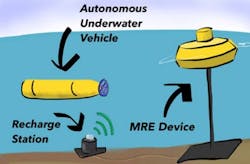
Marine energy provides an off-vehicle autonomous power source for at-sea AUV recharging. It would reduce the need to recover the vehicle as frequently, as well as reduce the detectability of operations at sea for security and military purposes. At-sea recharging could also shorten the distance requirement for the energy storage system, thereby enabling more, smaller, and lower-cost AUVs (see figure).
Unfortunately, AUVs do have a limited duration, typically able to last 24 hours before having to surface so that they could offload data via satellite or be recharged by a surface vessel.
Underwater docking and charging technology is the key to solving the problem of long-term underwater residence of AUVs. These stations presently rely on battery banks for power. Powering these stations with marine energy would provide a reliable, locally generated power source, smoothed for intermittency by battery backup.
Underwater recharging would reduce the need to recall vehicles to the surface as frequently; save time and resources; improve human safety; increase mission duration, range, and stealth; and reduce carbon emissions. Hybrid remotely operated vehicles (ROVs), which can be disconnected from the umbilical cable, could also benefit from marine energy.
Powering Underwater Recharge Stations
Underwater recharge stations now under development rely on battery banks for power. Powering these stations with marine energy would provide a more reliable, locally generated power source, smoothed for intermittency by battery backup.
References
1. “Underwater Remotely Operated Vehicles & Robots,” Deep Trekker.
2. “Cooling Improvement for High-Power-Density Shell-Mounted Underwater Propulsion Motors with Heat Bridges,” Huanyu Ou, Yuli Hu, Zhaoyong Mao, Wenlong Tian. and Bo Cheng, Journal of Marine Science and Engineering, Multidisciplinary Digital Publishing Institute (MDPI), 2024
3. “Power Systems for Autonomous Underwater Vehicles,” Albert M. Bradley, Michael D. Feezor, Member, IEEE, Hanumant Singh, and F. Yates Sorrell, IEEE Journal of Oceanic Engineering, Vol. 26, No. 4, October 2001.
4. “High-Power-Density Wireless Power Transfer System for Autonomous Underwater Vehicle Based on a Variable Ring-Shaped Magnetic Coupler,” Ben Zhang, Student Member, IEEE, Jinmao Chen, Xudong Wang, Wanli Xu, Changbo Lu, and Yong Lu, IEEE Transactions on Transportation Electrification, Vol. 10, No. 2, June 2024.
5. “The state-of-the-arts of underwater wireless power transfer: A comprehensive review and new perspectives,” De’an Wang, Jiantao Zhang, Shumei Cui, Zhi Bie, Fuze Chen, Chunbo Zhu, School of Electrical Engineering and Automation, Harbin Institute of Technology, Harbin 150001, China, October 27, 2023. 1364-0321/© 2023 Elsevier Ltd.
6. “A review of underwater docking and charging technology for autonomous vehicles,” Jixin Liu, Fei Yu, Bo He, C. Guedes Soares, Version of Record, 20 February 2024.
7. “Powering the Blue Economy: Exploring Opportunities for Marine Renewable Energy in Maritime Markets,” April 2019, Part 3. Underwater Vehicle Charging: Autonomous Underwater Vehicles, Unmanned Underwater Vehicles, and Remotely Operated Vehicles.
>>Download the PDF of this article, and check out the Library Series
About the Author

Steve Taranovich
Freelance Technical Writer, Phoenix Information Communication LLC
Steve is a contributing editor to Electronic Design.
Author of the non-fiction “Guardians of the Right Stuff,” a true story of the Apollo program as told by NASA and Grumman Corp. engineers, an astronaut, and technicians.
Experienced Editor-In-Chief of EETimes/Planet Analog and Senior Technical Editor at EDN running the Analog and Power Management Design Centers from 2012 to 2019.
A demonstrated history in electronic circuit design and applications for 40 years, and nine years of technical writing and editing in industry. Skilled in Analog Electronics, Space-related Electronics, Audio, RF & Communications, Power Management, Electrical Engineering, and Integrated Circuits (IC).
1972 to 1988 worked as a circuit design engineer in audio (8 years) and microwave (8 years). Then was Corporate Account Manager/applications engineer for Burr-Brown from 1988 to 2000 when TI purchased Burr-Brown. Worked for TI from 2000 to 2011.
Strong media and communication professional with a BEEE from NYU Engineering in 1972 and an MSEE from Polytechnic University in 1989. Senior Lifetime member of IEEE. Former IEEE Long Island, NY Director of Educational Activities. Eta Kappa Nu EE honor society member since 1970.
Comment About the Article
To join the conversation, and become an exclusive member of Electronic Design, create an account today!

Leaders relevant to this article: